Avoid¶
Avoiding agents and obstacles. Normally when used it is located between a Navigate and the Move to Location.
Radar¶
Agents will scan its environment and predicts where the least amount of stress is to avoid.
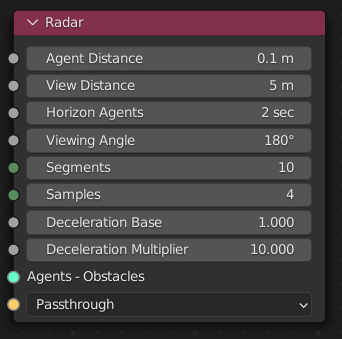
Agent Distance: Minimum allowed distance between agents.
View Distance: Distance agents will look ahead.
Horizon Agents: Amount of time an agent will look ahead.
Viewing Angle: Viewing angle of the horizon the agent will look at.
Segments: The viewing angle will be divided into this amount of segments. For each segment a weight is calculated. The segment with the least weight will be selected as solution.
Samples: Amount of samples to use in time.
Deceleration Base: Base value when accelerating/braking.
Deceleration Multiplier: Multiplier when accelerating/braking.
Agents Obstacles: Which agents and obstacles to avoid. When not connected all agents that aren’t placeholders will be avoided.
RVO¶
Agents will avoid other agents using the RVO algorithm. RVO is a mathematic method using ORCA lines.

Max Neighbors: Number of neighbor agents to consider.
Nav Mesh: Borders of the navigation mesh will be used as obstancles.
Agent Distance: Minimum allowed distance between agents.
View Distance: Distance agents will look ahead.
Horizon Agents: Time agents will look ahead when identifying possible collisions with other agents.
Horizon Obstacles: Time agents will look ahead when identifying possible collisions with nav mesh borders.
Agents Obstacles: Which agents and obstacles to avoid. When not connected all agents that aren’t placeholders will be avoided.
Force TTC¶
Agents will avoid other agents using a force based algorithm with time to collision aspect.
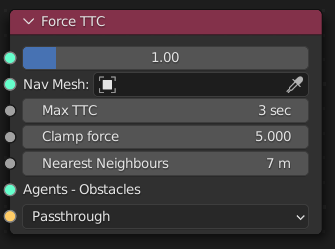
Scaling Factor: Influence of the force on the agent.
Nav Mesh: Borders of the navigation mesh will be used as obstancles.
Max TTC: Time agents will look ahead when identifying possible collisions.
Clamp force: The resuling force will be clamped to reduce effect when there is a collision.
Nearest Neighbors: Only consider agents within this distance.
Agents Obstacles: Which agents and obstacles to avoid. When not connected all agents that aren’t placeholders will be avoided.
Implicit Force TTC¶
Agents will avoid other agents using a force based algorithm with time to collision aspect. The algorithm will use several iterations to find a solution that has requires minimal energy.
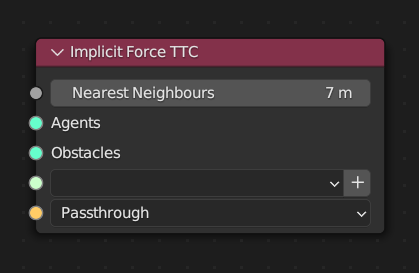
Nearest Neighbors: Only consider agents within this distance.
Agents: Which agents should be considered when avoiding. When not connected all agents that aren’t placeholders will be avoided.
Obstacles: Which objects/agents should be handled as obstacles. The objects can be agents or supporting objects and empties. Obstacles will not move when avoiding. Agents that are passes as Agent and as Obstacles will be evaluated as obstacle.
Target: When set to a target, the agent that is selected in the target slot will be not be considered by the agent that is targeting.